Here's the system I've got:
https://store.diydrones.com/Xbee_Telemetry_kit_p/kt-telemetry-xbee.htm
It's got an XtreamBee Board, an XtreamBee USB Adapter, a matched pair of xbee modules, and all the bits needed to get things set up.
It was working before:
http://eastbay-rc.blogspot.com/2011/10/first-test-of-apm-auto-mode-drone.html
http://eastbay-rc.blogspot.com/2011/10/xbee-apm-overview.html
And now it's not working.
symptom: The blue power light comes on on both sides, but the Rx/Tx lights don't come one, and the ground station can't make a connection.
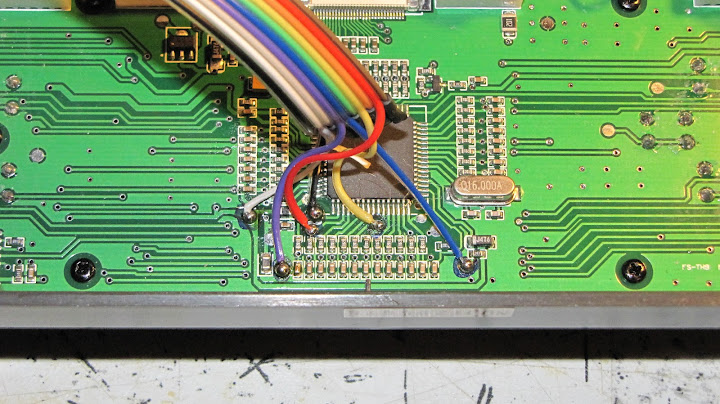
I went ahead and fixed the problem I had where the xbee was soldered inside the socket. You can see one of the pins has a glob of solder on the side. It was obvious which pin it would be, as the connection for the socket had a "sucked in" look instead of a "dimpled hershey kiss" look, from where the solder had been pulled into the socket. Heating the socket leg from the bottom allowed the xbee to be pulled out nicely.

This allowed me to get both xbee modules attached to the PC and get this information, which seems to verify that the two xbee units are functional (at least in talking to the PC), and that the xbee pro unit is likewise functional.
Likewise, both xbee modules respond to +++ and AT commands from a terminal session.
So, I'm reasonably confident that those three pieces are OK. What to do next? How to verify the xtremebee board?
I'm going to solder some new headers onto the xbee remote carrier, although testing the continuity with a multimeter showed that the pins were all making contact.
I can't find anybody that's a real xbee guru to advise me on this. If I ever get these working again, I am going to really study these things until I understand them really well. My xbee skillz will be my ticket to fame and fortune!