CyberBrick software:
https://bambulab.com/en-us/download/cyberbrick-apps
API Document:
https://makerworld.com/en/cyberbrick/api-doc/

https://github.com/mstrens/oXs_on_RP2040
https://www.rcgroups.com/forums/showthread.php?4130529-openXsensor-on-RP2040-board
https://www.rcgroups.com/forums/showpost.php?p=52841555&postcount=11334
It is here, under the Drivers tab:
https://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers
There is an installer and uninstaller.
When you install, you will probably get a security warning and have to allow it in System Settings.
https://www.faa.gov/uas/getting_started/remote_id/fria
https://faa.maps.arcgis.com/apps/webappviewer/index.html?id=8f274117010f4eb1a50f64c1719be12b

Information and photos courtesy of AirDOGGe @ RCGroups here.


Courtesy of flightengr at Realflight Forums:
Most models follow some standard conventions.
All helis have a Throttle Hold feature on RealFlight Channel 9. You need to release that hold in order to make the heli responsive to the throttle.
Planes generally have:
flaps on RealFlight Channel 6 - Flaps, the landing gear on RealFlight Channel 7 - Smoke, and either SAFE Panic Mode or Thrust Reverse on RealFlight Channel 12. Both planes and helis equipped with SAFE flight modes use RealFlight Channel 8 to change modes.
You don't mention which controller you're using. If you're using the InterLink DX controller, here's where you'll find those functions:
Switch A - RF Channel 7 - Smoke and landing gear
Switch B - RF Channel 8 - Mode
Switch C - RF Channel 5 - Elevator Dual Rate
(or Dual Rate for all of Ail/Ele/Rud
when only one switch is used by the model)
Switch D - RF Channel 6 - Flaps
Switch H - RF Channel 9 - Throttle Hold (for helis)
Switch F - RF Channel 10 - Aileron Dual Rate
Switch G - RF Channel 11 - Rudder Dual Rate
Button I - RF Channel 12 - SAFE Panic or Thrust Reverse
(depends if the model has either of these features)
If you're using your own radio as a controller, you'll have to map your radio's channels to the RealFlight Channels using the Controller Profile.
Eachine e130 2.4g 4ch 6-axis gyro altitude hold flybarless rc helicopter rtf Sale - Banggood.com
Logical switches:
L1 AND SFv L2Mixers
Read somewhere:
Finally dialed in some aileron to elevator mix, so that there is some
down elevator when ailerons (right or left) are moving.
Your results may vary, after some trial flights I have now some 35%
aileron differential, and 25% aileron-elevator mix (positive for right
aileron movement, negative for left aileron movement), and the Wingnetic
now rolls the way it should.
Unit

RC Groups Threads
$ ./mdloader_mac --first --download massdrop_ctrl_config.bin --restart
Massdrop Loader 1.04
Massdrop Loader Copyright (C) 2018 Massdrop Inc.
This program is Free Software and has ABSOLUTELY NO WARRANTY
Scanning for device for 60 seconds
......... ***** PRESS FN-B FOR 1 SECOND AND RELEASE TO REBOOT
Device port: /dev/cu.usbmodem141412201 (SAMD51J18A)
Opening port '/dev/cu.usbmodem141412201'... Success!
Found MCU: SAMD51J18A
Bootloader version: v2.20 Mar 27 2019 10:04:47 [ctrl]
Applet file: applet-flash-samd51j18a.bin
Applet Version: 1
Writing firmware... Complete!
Booting device... Success!
Closing port... Success!
# https://docs.qmk.fm/#/newbs_getting_started
# github fork qmk_firmware
brew install qmk/qmk/qmk
qmk setup marhar/qmk_firmware
cd $HOME/qmk_firmware
qmk compile -kb massdrop/ctrl -km default
qmk config user.keyboard=massdrop/ctrl
qmk config user.keymap=marhar
qmk new-keymap
qmk compile
qmk compile -kb massdrop/ctrl -km marhar
vi keyboards/massdrop/ctrl/keymaps/marhar/keymap.c
vi keyboards/massdrop/ctrl/keymaps/default/keymap.c
$ ls $HOME/qmk_firmware/*.bin
massdrop_ctrl_default.bin
massdrop_ctrl_marhar.bin
RCGroups thread:
Midelic Firmware thread:
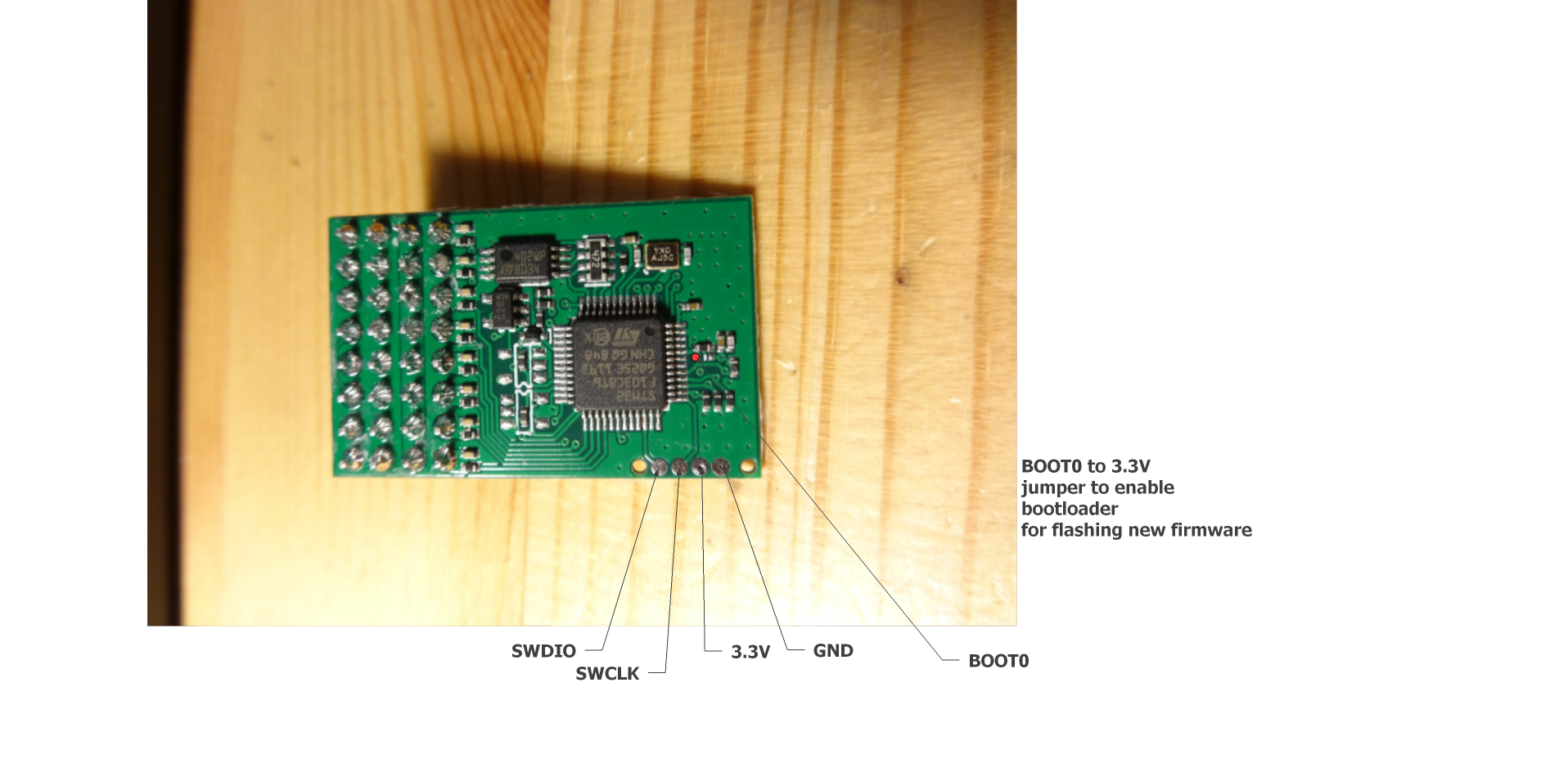
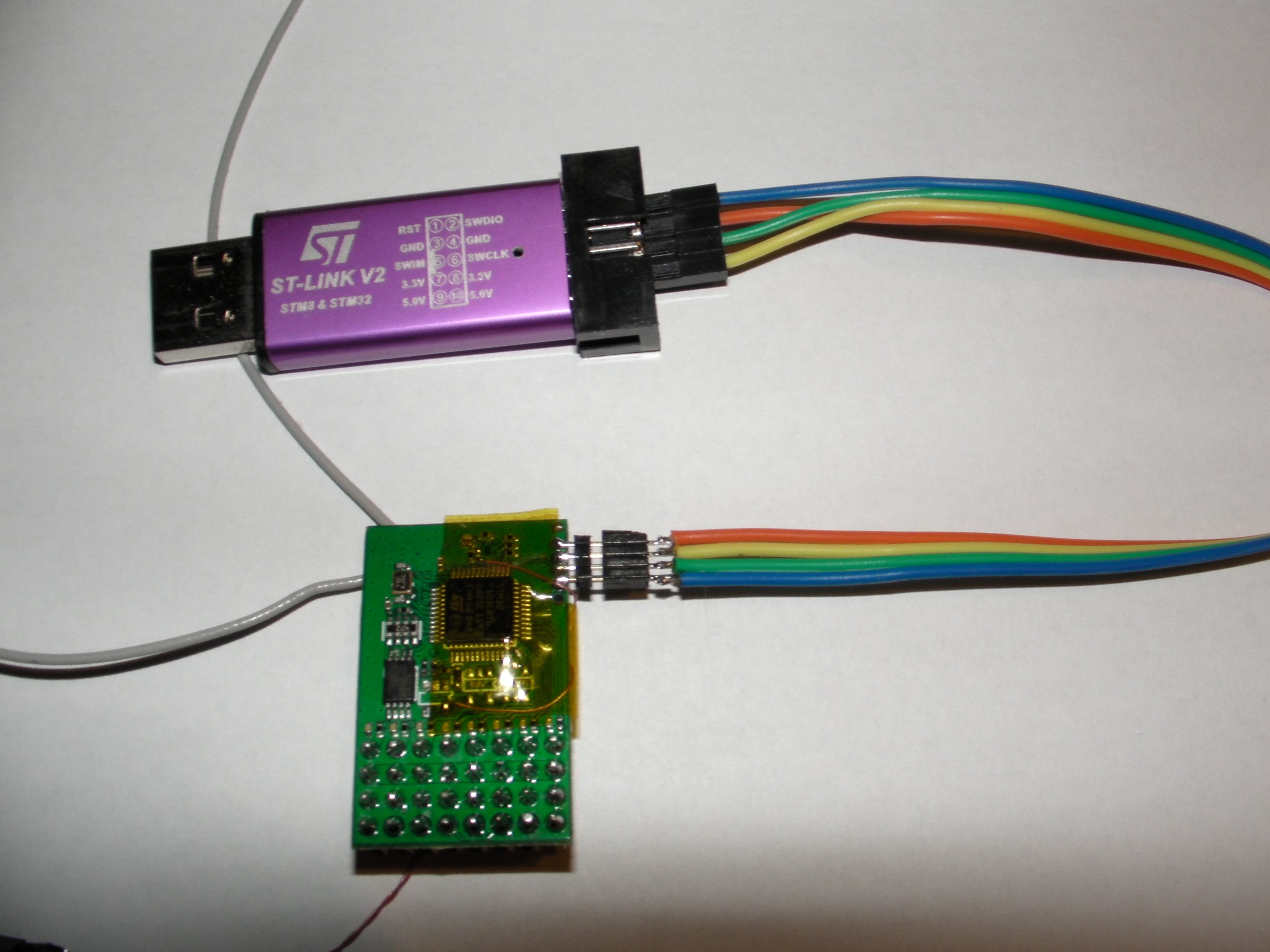
STM Flasher and Tutorial
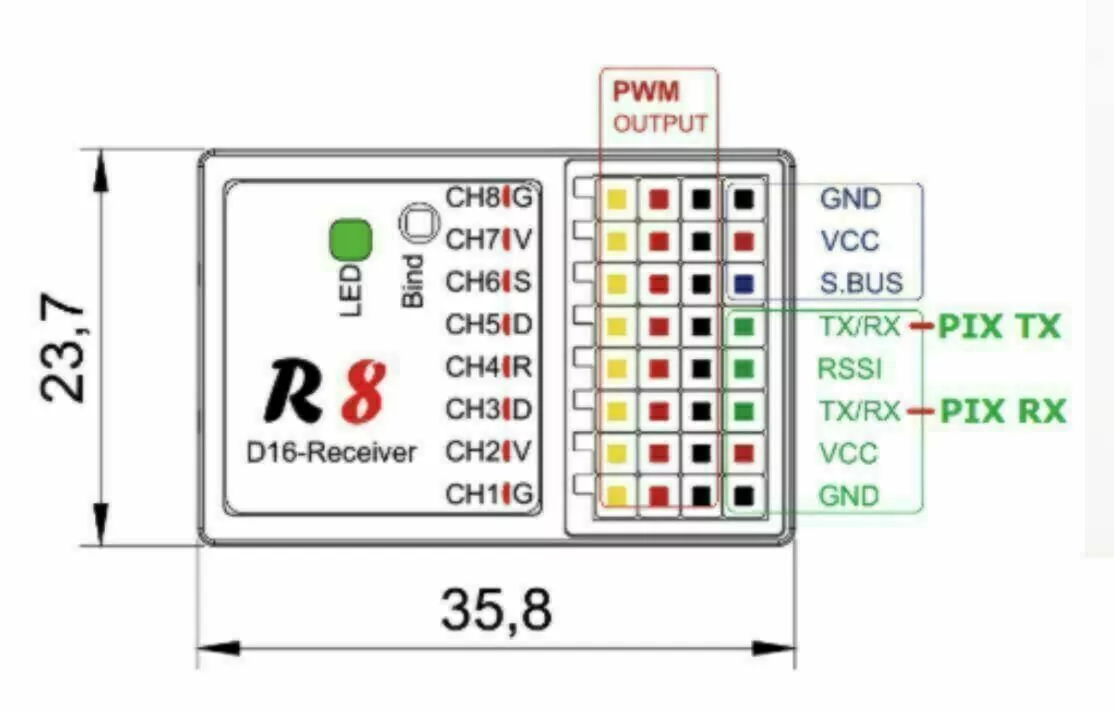
Flashing new firmware on Jumper R8 connections.
Some good tips from the Amazon page.


CG check .................. https://www.rcgroups.com/forums/show...&postcount=129
May not work in safe mode.
---
----
---
|
In auto-level mode, the individual gains set using the script affect the amount of servo movement output to get to level. The channel 9 gain affects the speed of the servo response..
375pcs Five Colors 3mm,5mm Round Bright Light LED Assortment Kit
| |||||||
Color
|
Size
|
Wavelength
(nm)
|
Voltage
(V)
|
Current
(mA)
|
Intensity
(mcd)
|
Lens Color
|
Quantity
|
Red
|
3mm
|
620-630
|
1.9-2.1
|
20
|
3000-4000
|
red
|
50pcs
|
Red
|
5mm
|
620-630
|
2.8-3.1
|
20
|
4000-5000
|
red
|
25pcs
|
Yellow
|
3mm
|
580-590
|
1.9-2.1
|
20
|
5000-6000
|
yellow
|
50pcs
|
Yellow
|
5mm
|
580-590
|
2.8-3.1
|
20
|
4000-5000
|
yellow
|
25pcs
|
Green
|
3mm
|
570-573
|
3.2-3.4
|
20
|
10000-12000
|
green
|
50pcs
|
Green
|
5mm
|
570-573
|
3.0-3.4
|
20
|
12000-14000
|
green
|
25pcs
|
White
|
3mm
|
610-620
|
1.8-2.2
|
20
|
3000-4000
|
clear
|
50pcs
|
White
|
5mm
|
500-620
|
3.0-3.2
|
20
|
12000-14000
|
clear
|
25pcs
|
Blue
|
3mm
|
460-470
|
3.2-3.4
|
20
|
3000-4000
|
blue
|
50pcs
|
Blue
|
5mm
|
460-470
|
3.0-3.4
|
20
|
5000-6000
|
blue
|
25pcs
|