Andreas asked me about getting an Arduino development board, and this is what I told him, based on about a year's worth of experience.
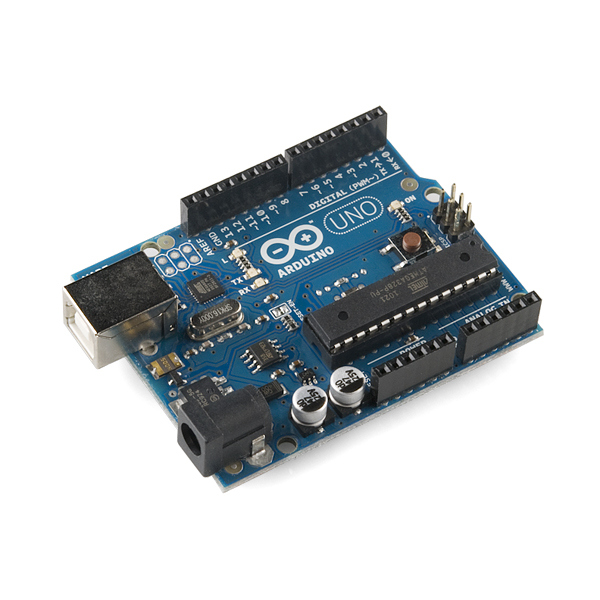
It seems the industry standard for standalone boards is the "Uno", which uses the ATmega328. If you see a web page mentioning the Arduino Duemilanove, it's probably pre-dating the Uno.
http://www.sparkfun.com/products/9950
http://www.sparkfun.com/products/10356

http://www.sparkfun.com/products/10173
The best feature is this nice project book, which is worth checking out in any case. It's a good introduction to the software as well as the hardware.
http://www.sparkfun.com/tutorial/AIK/ARDX-EG-SPAR-PRINT-85-REV-10.pdf

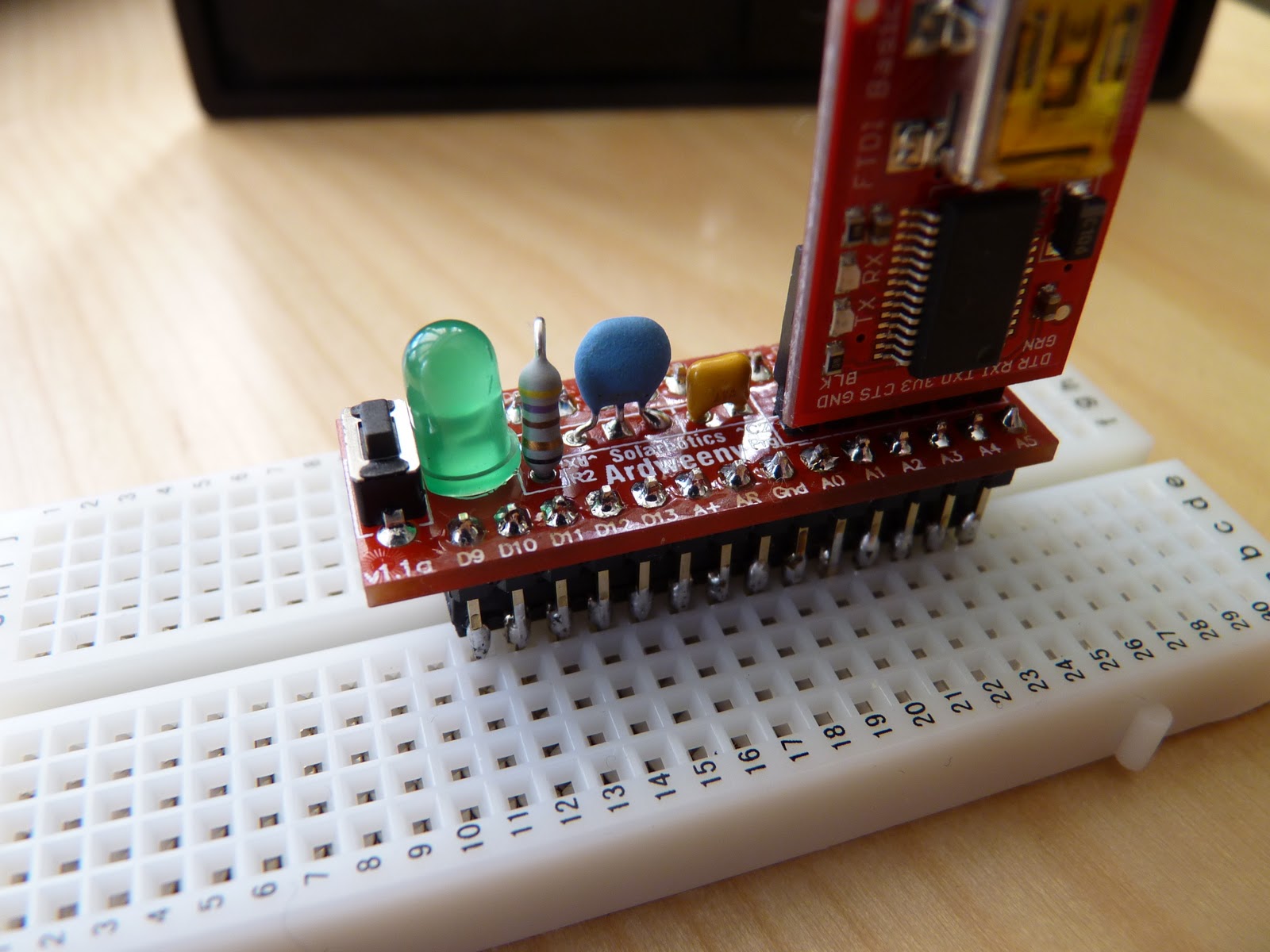
I got the Ardweeny too, which is a pretty neat little system, and awesome for $10. For a lot of projects, an Ardweeny with a breadboard will do everything the Uno will do for 1/3 the price if you're comfortable with the soldering. It was one of the first "real" projects I soldered and I didn't have any problems with it.
http://solarbotics.com/products/kardw/
http://eastbay-rc.blogspot.com/2011/11/ardweeny-tiny-little-arduino.html
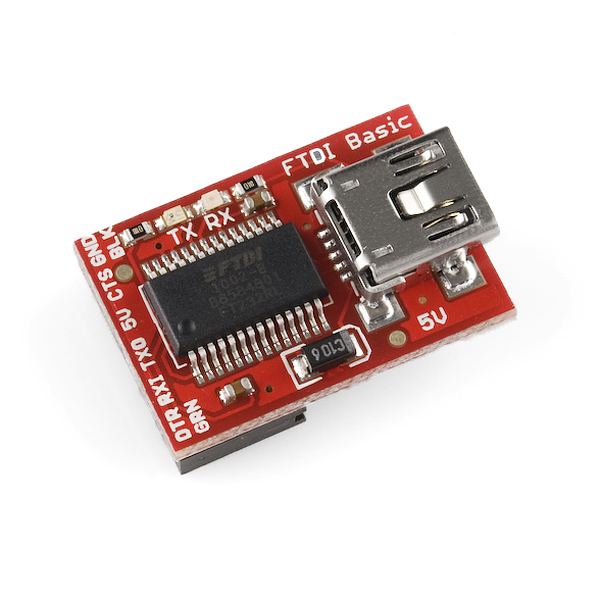
The Ardweeny needs an FTDI adapter, which plugs into a USB cable. If you're messing around with other Arduino projects like the MultiWiiCopter you will probably have one already. If you get an Uno, you just need a standard USB cable.
http://www.solarbotics.com/products/50512/
http://eastbay-rc.blogspot.com/2011/10/ftdi-and-avr-cables.html
http://eastbay-rc.blogspot.com/2011/11/attaching-ftdi-connector-to-arduino.html
Clones
My friend and coworker Mark VandeWettering (also the proprietor of brainwagon.org, which you should be reading if you're interested in Arduino things), has mentioned that he's using the OSEPP Arduino clones from Fry's.
search for OSEPP at Fry's
DealExtreme carries some clones as well. Radio Shack is selling genuine Arduino products at about the same price as Sparkfun. It's nice to see them getting back to their electronics tinkering roots.

To get the ATmega2560, it seems the choice is pretty limited. It seems that most people's projects fit in the ATMega328 space, so there's not the broad variety of boards in various configurations. Or perhaps it's just a matter of time? In either case, avoid the ATmega1280 unless the price difference is worth not having the extra 128K of memory.
http://www.sparkfun.com/products/9949
http://www.frys.com/product/6745685

http://store.diydrones.com/product_p/br-ardupilot-01.htm
Bits and Pieces
For electronics pieces, Fry's or http://www.goldmine-elec.com. Get the pieces outlined in the inventors kit above, or if you have a specific project in mind follow the instructions for that. Get a few small breadboards. Nothing kills your enthusiasm like having to disassemble and reassemble every project when you want to show somebody something.
My Recommendations
- If you're an absolute beginner like I was, get the Inventor's Kit.
- If you're comfortable soldering and want to save quite a few bucks, get one or two Arduweenys and some breadboards.
- If you're familiar with electronics but don't want to solder, get an Uno.
- If your project requires an ATmega chip, you don't have many options other than the ATMega2560.
- Get some extra breadboards. Goldmine has some cheap ones.
- Get some extra parts -- resistors, LEDs, etc.
If I had to do it all over again, I think I would get an Ardweeny
and a couple of breadboards. Then you can keep the wiring all together,
and move the Ardweeny between boards. (plus random resistors, leds,
etc)


























.jpg)